MoveIt Commander Scripting¶
The moveit_commander Python package offers wrappers for the functionality provided in MoveIt. Simple interfaces are available for motion planning, computation of Cartesian paths, and pick and place. The moveit_commander package also includes a command line interface, moveit_commander_cmdline.py.
Getting Started¶
If you haven’t already done so, make sure you’ve completed the steps in Getting Started.
Starting RViz and the Command Line Tool¶
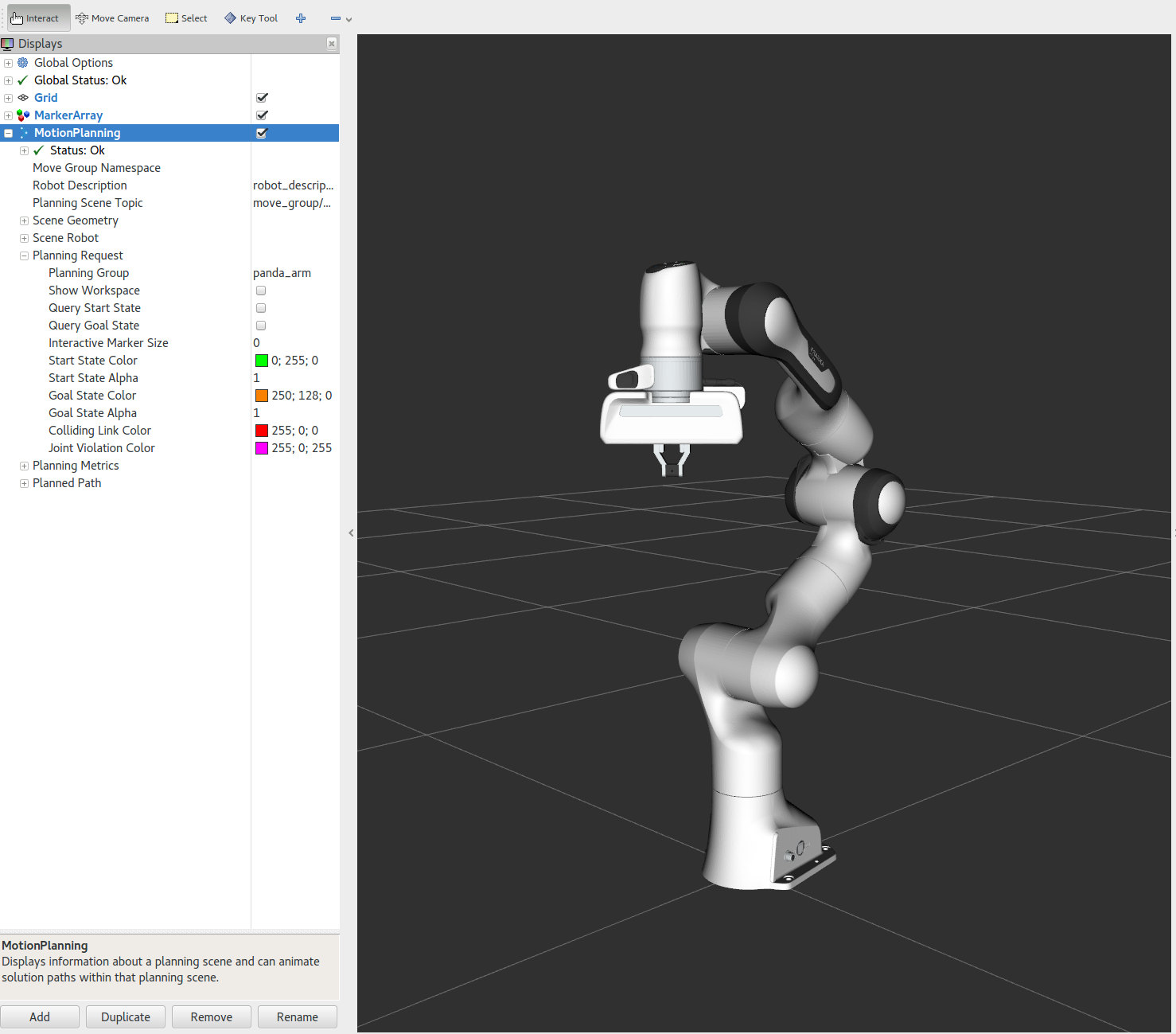
Open two shells. Start RViz and wait for everything to finish loading in the first shell:
roslaunch panda_moveit_config demo.launch
Now initiate the moveit_commander interface in another shell:
rosrun moveit_commander moveit_commander_cmdline.py
Using the MoveIt Commander Command Line Tool¶
The first command you should type is:
use panda_arm
where panda_arm is the group name which you want to command. This will connect you to a running instance of the move_group node. You can now execute commands on that group.
This command, current, will show you the current state of your group:
current
To record that state under a specific name you can simply type:
rec c
This will remember the current joint values of the robot group under the name c. Matlab-like syntax is available for modifying joint values. The code above copies the joint values of c into a new variable named goal. We then modify the first joint of goal to 0.2. You may need to use a different value instead of 0.2 (it needs to be within your allowed bounds and not cause collisions). The go command plans a motion and executes it.
To get the robot to move, you could type, for example:
goal = c
goal[0] = 0.2
go goal
Instead of calling go you could also type:
goal[0] = 0.2
goal[1] = 0.2
plan goal
execute
This is slightly inefficient, but the advantage is that the plan command allows you to visualize the computed motion plan in RViz before you actually issue the execute command.
For a list of supported commands, you can type help. To exit the moveit_commander interface you can type quit.
Open Source Feedback
See something that needs improvement? Please open a pull request on this GitHub page