OPW Kinematics Solver for Industrial Manipulators¶
Intro¶
Taken from opw_kinematics: A simple, analytical inverse kinematic library for industrial robots with parallel bases and spherical wrists. Based on the paper An Analytical Solution of the Inverse Kinematics Problem of Industrial Serial Manipulators with an Ortho-parallel Basis and a Spherical Wrist by Mathias Brandstötter, Arthur Angerer, and Michael Hofbaur.
Purpose¶
This package is meant to provide a simpler alternative to IK-Fast based solutions in situations where one has an industrial robot with a parallel base and spherical wrist. This configuration is extremely common in industrial robots.
The kinematics are parameterized by 7 primary values taken directly from the robot’s spec sheet and a set of joint-zero offsets. Given this structure, no other setup is required.
Installation¶
The opw_kinematics_plugin can be installed using apt on Ubuntu and Debian:
sudo apt install ros-noetic-moveit-opw-kinematics-plugin
Usage¶
- Find the MoveIt kinematics.yaml file created for your robot.
- Replace
kinematics_solver: kdl_kinematics_plugin/KDLKinematicsPlugin(or similar) withkinematics_solver: moveit_opw_kinematics_plugin/MoveItOPWKinematicsPlugin. - Set parameters to describe the geometry of your manipulator.
The following is an example of the parameters needed for the KUKA KR 6 R700:
manipulator:
kinematics_solver: moveit_opw_kinematics_plugin/MoveItOPWKinematicsPlugin
opw_kinematics_geometric_parameters:
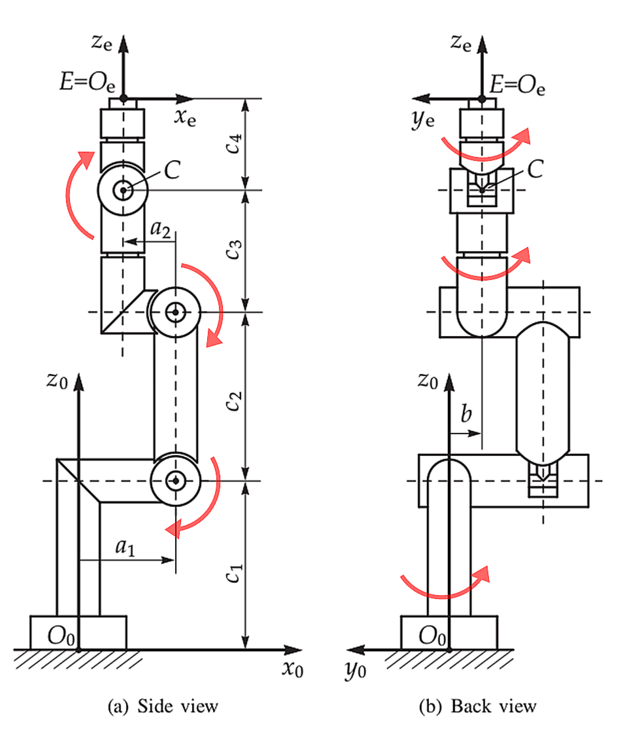
a1: 0.025
a2: -0.035
b: 0.000
c1: 0.400
c2: 0.315
c3: 0.365
c4: 0.080
opw_kinematics_joint_offsets: [0.0, -1.57079632679, 0, 0, 0, 0]
opw_kinematics_joint_sign_corrections: [-1, 1, 1, -1, 1, -1]
The meaning of the parameters can best be understood with a sketch and some tinkering. The plugin will print a ROS_ERROR on startup if they
do not match your URDF, so you can safely guess and test if needed:
Sharing OPW descriptions¶
We plan to collect OPW parameter sets as part of the ROS-Industrial robot support packages. This has already started for FANUC.
Taking the M-10iA as
an example you can reduce your kinematics.yaml to the following:
manipulator:
kinematics_solver: moveit_opw_kinematics_plugin/MoveItOPWKinematicsPlugin
and then add a rosparam load line to your launch/planning_context.launch which causes the parameters in that file to be loaded onto the parameter server:
<!-- Load default settings for kinematics; these settings are overridden by settings in a node's namespace -->
<group ns="$(arg robot_description)_kinematics">
<rosparam command="load" file="$(find opw_tutorial)/config/kinematics.yaml"/>
<rosparam command="load" ns="manipulator" file="$(find fanuc_lrmate200ib_support)/config/opw_parameters_lrmate200ib.yaml"/>
</group>
Note that the ns parameter has to match the name you gave your planning group during the setup.
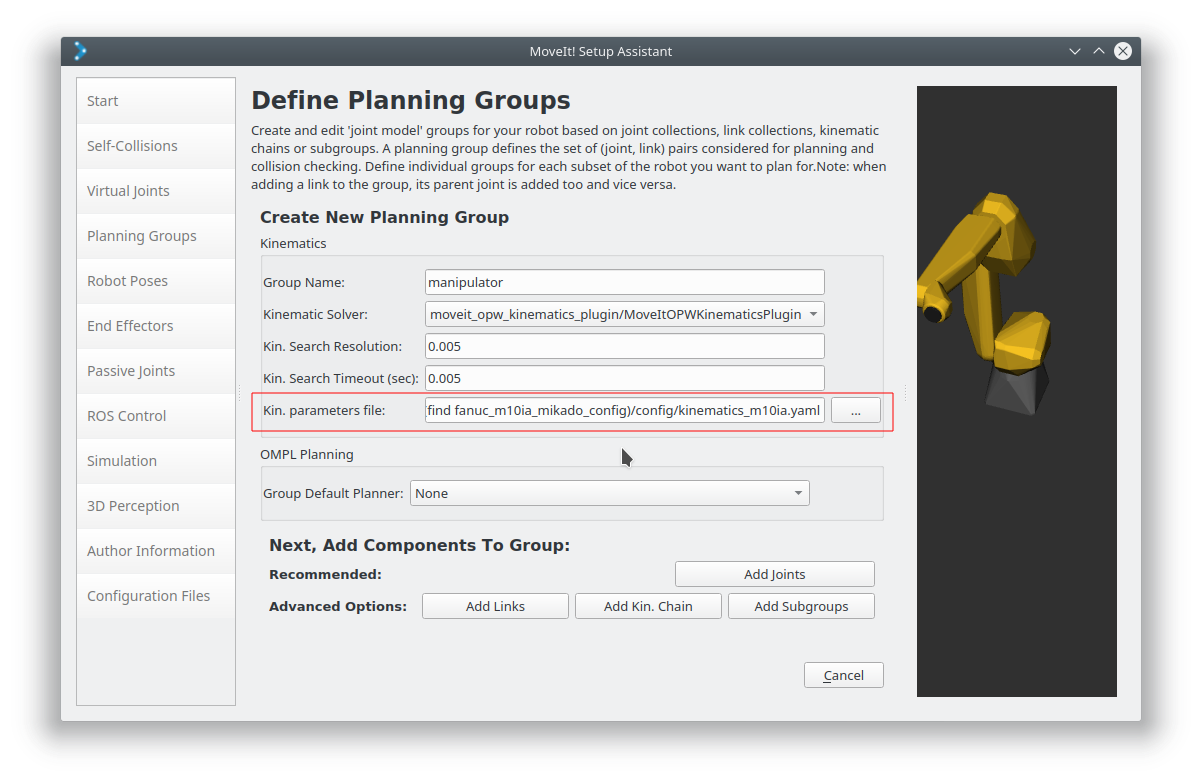
The MoveIt Setup Assistant can automatically insert that line, removing the need to manually edit the planning_context.launch file. On the Define Planning Group page, select the opw_parameters
file for your robot in the Kin. parameters file field
Open Source Feedback
See something that needs improvement? Please open a pull request on this GitHub page